Robot Mechanical Arm

This Page is Underconstuction
End-of-Arm Tooling (EOAT) ที่ถือเป็นส่วนสำคัญของแขนกลหุ่นยนต์ (Robot Arms) คือหนึ่งในส่วนประกอบที่สำคัญที่สุดของระบบอัตโนมัติสำหรับอุตสาหกรรมสมัยใหม่ ในขณะที่เทคโนโลยีการหยิบจับที่ยืดหยุ่นมีการพัฒนาไปอย่างมากในการหยิบและวางวัตถุต่าง ๆ เทคโนโลยีการรับสัมผัสก็ได้รับการเพิ่มขีดความสามารถในการควบคุมแรงกระทำ เพื่อให้หุ่นยนต์สามารถวางและกำหนดตำแหน่งวัตถุต่าง ๆ ได้อย่างเที่ยงตรง ซึ่งความสามารถด้านการรับสัมผัสในเซ็นเซอร์รับแรงกระทำแรงบิด และเซ็นเซอร์ตรวจจับวัตถุใกล้เคียงขั้นสูง ยังช่วยให้หุ่นยนต์สามารถกำหนดเป้าหมายของวัตถุอย่างเหมาะสม ผ่านการใช้แรงกระทำที่เหมาะสมได้ ดังนั้นถือเป้นความจำเป็นที่อุตสาหกรรมต้องให้ความสำคัญกับการใช้งานที่หลากหลายของอุปกรณ์ปลายแขนหุ่นยนต์ ทั้งในส่วนอุปกรณ์การหยิบจับ เซ็นเซอร์ เครื่องเปลี่ยนอุปกรณ์ การควบคุมผ่านการมองเห็น ฯลฯ
เราจำหน่ายหุ่นยนต์, แขนกล ที่ใช้ในลักษณะงานต่างๆ
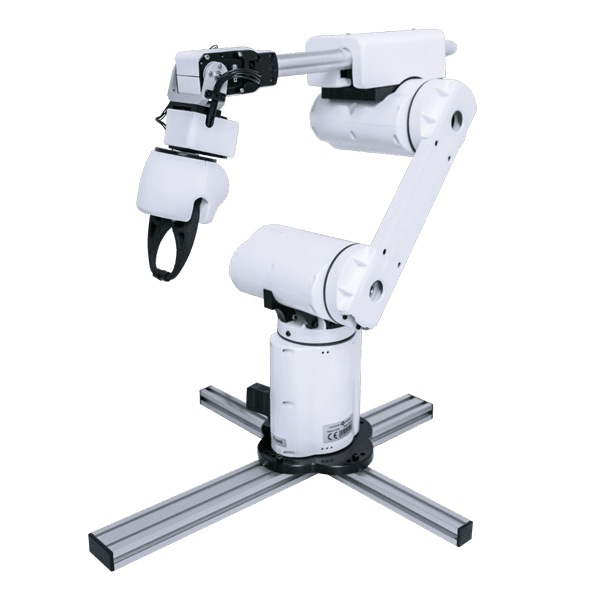
หุ่นยนต์, แขนกล
Sensor เสริมระบบอัตโนมัติ เพื่อการทำงานร่วมกับมนุษย์ ระบบการทำงานร่วมกับมนุษย์ส่วนใหญ่จำเป็นต้องมีการปรับแต่งที่ซับซ้อนเพื่อการทำงานกับวัตถุต่าง ๆ ซึ่งรวมถึงการกำหนดตำแหน่งของรายการวัตถุต่าง ๆ อย่างถูกต้อง การทำงานบนเส้นทางลำเลียงที่จะไม่เกิดการชนกันการควบคุมแรงกระทำและการบริหารปฏิสัมพันธ์อันซับซ้อนระหว่างหุ่นยนต์กับสภาพแวดล้อมไปพร้อม ๆ กัน โดยเทคนิคการรับสัมผัสแบบใหม่ล่าสุดในเซ็นเซอร์ตรวจจับวัตถุใกล้เคียงและเซ็นเซอร์รับแรงกระทำ และแรงบิดช่วยให้อุปกรณ์หยิบจับสามารถโยกย้ายวัตถุได้โดยปราศจากการชนและความเสียหาย ทั้งยังช่วยให้อุปกรณ์หยิบจับสามารถจับยึดวัตถุต่าง ๆ ได้ด้วยแรงที่เหมาะสม ดังนั้น จึงสนับสนุนการทำงานร่วมกับมนุษย์ได้เป็นอย่างดี
รายละเอียด
| ระยะรวม | 360 เซนติเมตร |
| ระยะลอยน้ำ | 50 เซนติเมตร |
| ระยะจมน้ำ | 310 เซนติเมตร |
| ความยาว | 375 เมตร |
| ความยาวต่อชุด | 375 เมตร |
| ขนาดโซ่ | 22 มิลลิเมตร |
| จำนวน | 210 ทุ่น |
รูปตัวอย่างการใช้งาน
